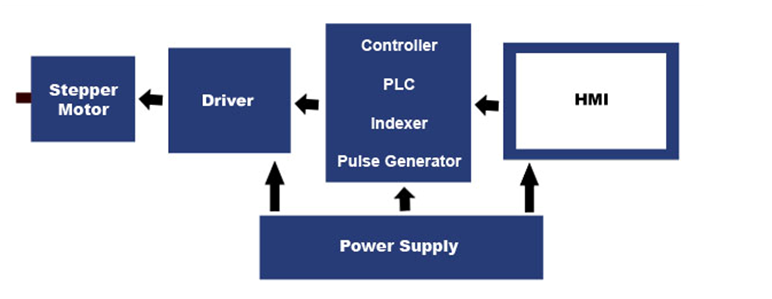
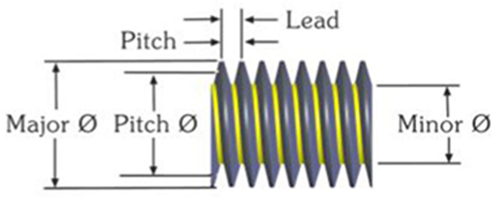
A common way to generate precise linear motion is to use an electric motor (rotary motion) and pair it with a lead screw to generate a linear actuation system. Depending upon what this linear actuator interfaces with it can be constructed in a number of different ways.
Here we will discuss several different ways to combine a lead screw and nut with a stepper motor to create a linear actuator system. The stepper motor is frequently used in motion control as it is a cost effective technology that does not require position feedback to operate correctly.

3 Different Styles
There are three different styles of linear actuators that are commonly used they are the external nut linear actuator style, non-captive style and captive style. There are many reasons to use a certain style of linear actuator, the three main reasons for selecting one style over another are:
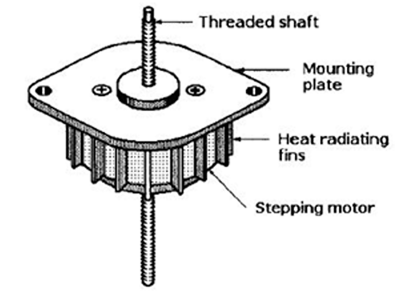
Size 23 stepper motor.
Stroke What is the amount of linear travel required?
Interface Point:
How will the actuator be mounted and how will the load be attached?
Options: What other options might be required from the linear actuator?
External Linear Actuator
The simplest way to envision this combination of parts is to simply affix the lead screw onto the shaft of the motor. The nut that rides on the lead screw must be restrained from rotating so that linear motion will be generated. This type of actuator is commonly referred to as an external linear style actuator.
Non-Captive (through screw) Linear Actuator
Another option is to locate the nut inside the motor and allow the screw to move linearly through the actuator. In this case the screw must be prevented from rotating to generate the linear motion.This style of actuator is commonly referred to as a through screw or non-captive linear actuator.
Captive Linear Actuator
In instances where the application does not have a mechanism to prevent the rotation of either the nut or the screw a third style exists. This style locates the nut inside the actuator body just like the non-captive actuator above but on the front side a linear spline is attached to the screw, this linear spline engages a front sleeve that is rigidly fixed to the actuator this prevents the rotation of the screw and provides linear output. This style of actuator is referred to as a captive style actuator.
http://blog.aujourdhui.com/c00alvin/2538028/how-to-deduce-stepping-motor-wiring.html
https://christ282.bcz.com/2019/11/06/types-of-speed-reducers-and-gear-stepper-motors/